A sparse auto-encoder tries to reconstruct the inputs from a compressed representation.
More...
|
| | SparseAutoEncoder (int D, int H, double beta, double rho, double lambda, ActivationFunction act) |
| | Sparse auto-encoder. More...
|
| |
| virtual Eigen::VectorXd | operator() (const Eigen::VectorXd &x) |
| | Make a prediction. More...
|
| |
| virtual Eigen::MatrixXd | operator() (const Eigen::MatrixXd &X) |
| | Make predictions. More...
|
| |
| virtual bool | providesInitialization () |
| | Check if the object knows how to initialize its parameters. More...
|
| |
| virtual void | initialize () |
| | Initialize the optimizable parameters. More...
|
| |
| virtual unsigned int | dimension () |
| | Request the number of optimizable parameters. More...
|
| |
| virtual void | setParameters (const Eigen::VectorXd ¶meters) |
| | Set new parameters. More...
|
| |
| virtual const Eigen::VectorXd & | currentParameters () |
| | Request the current parameters. More...
|
| |
| virtual double | error () |
| | Compute error on training set. More...
|
| |
| virtual bool | providesGradient () |
| | Check if the object provides a gradient of the error function with respect to its parameters. More...
|
| |
| virtual Eigen::VectorXd | gradient () |
| | Compute gradient of the error function with respect to the parameters. More...
|
| |
| virtual void | errorGradient (double &value, Eigen::VectorXd &grad) |
| | Calculates the function value and gradient of all training examples. More...
|
| |
| virtual Learner & | trainingSet (DataSet &trainingSet) |
| | Set training set. More...
|
| |
| virtual void | forwardPropagate (Eigen::MatrixXd *x, Eigen::MatrixXd *&y, bool dropout, double *error=0) |
| | Forward propagation in this layer. More...
|
| |
| virtual void | backpropagate (Eigen::MatrixXd *ein, Eigen::MatrixXd *&eout, bool backpropToPrevious) |
| | Backpropagation in this layer. More...
|
| |
| virtual Eigen::MatrixXd & | getOutput () |
| | Output after last forward propagation. More...
|
| |
| virtual Eigen::VectorXd | getParameters () |
| | Get the current values of parameters (weights, biases, ...). More...
|
| |
| virtual OutputInfo | initialize (std::vector< double * > ¶meterPointers, std::vector< double * > ¶meterDerivativePointers) |
| | Fill in the parameter pointers and parameter derivative pointers. More...
|
| |
| virtual void | initializeParameters () |
| | Initialize the parameters. More...
|
| |
| virtual void | updatedParameters () |
| | Generate internal parameters from externally visible parameters. More...
|
| |
| Eigen::MatrixXd | getInputWeights () |
| |
| Eigen::MatrixXd | getOutputWeights () |
| |
| Eigen::VectorXd | reconstruct (const Eigen::VectorXd &x) |
| |
| | Learner () |
| |
| virtual | ~Learner () |
| |
| virtual Learner & | trainingSet (Eigen::MatrixXd &input, Eigen::MatrixXd &output) |
| | Set training set. More...
|
| |
| virtual Learner & | removeTrainingSet () |
| | Remove the training set from the learner. More...
|
| |
| virtual Learner & | validationSet (Eigen::MatrixXd &input, Eigen::MatrixXd &output) |
| | Set validation set. More...
|
| |
| virtual Learner & | validationSet (DataSet &validationSet) |
| | Set validation set. More...
|
| |
| virtual Learner & | removeValidationSet () |
| | Remove the validation set from the learner. More...
|
| |
| virtual | ~Optimizable () |
| |
| virtual void | finishedIteration () |
| | This callback is called after each optimization algorithm iteration. More...
|
| |
| virtual unsigned | examples () |
| | Request number of training examples. More...
|
| |
| virtual double | error (unsigned n) |
| | Compute error of a given training example. More...
|
| |
| virtual Eigen::VectorXd | gradient (unsigned n) |
| | Compute gradient of a given training example. More...
|
| |
| virtual void | errorGradient (int n, double &value, Eigen::VectorXd &grad) |
| | Calculates the function value and gradient of a training example. More...
|
| |
| virtual Eigen::VectorXd | error (std::vector< int >::const_iterator startN, std::vector< int >::const_iterator endN) |
| | Calculates the errors of given training examples. More...
|
| |
| virtual Eigen::VectorXd | gradient (std::vector< int >::const_iterator startN, std::vector< int >::const_iterator endN) |
| | Calculates the accumulated gradient of given training examples. More...
|
| |
| virtual void | errorGradient (std::vector< int >::const_iterator startN, std::vector< int >::const_iterator endN, double &value, Eigen::VectorXd &grad) |
| | Calculates the accumulated gradient and error of given training examples. More...
|
| |
| virtual | ~Layer () |
| |
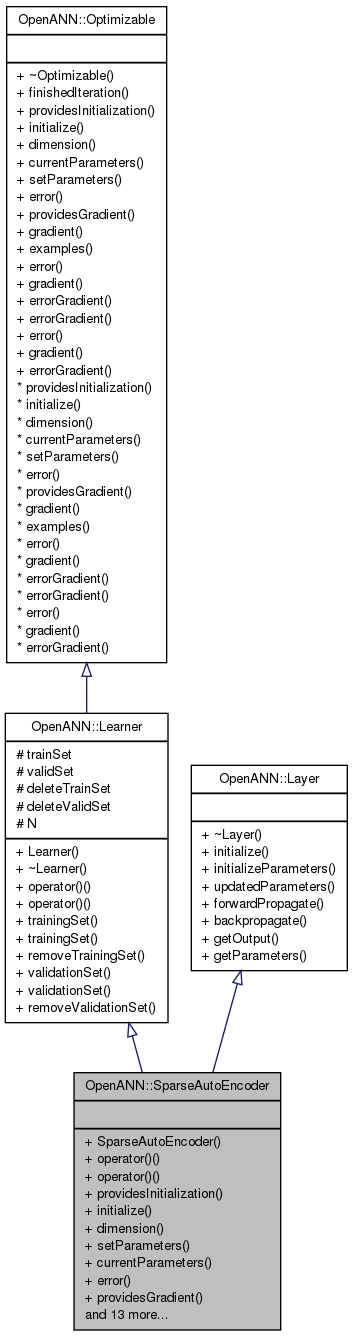
A sparse auto-encoder tries to reconstruct the inputs from a compressed representation.
Its objective function includes a penalty term for the distance to the desired mean activation of the hidden nodes as well as the reconstruction error. Sparse auto-encoders (SAEs) can be used to train multiple layers of feature detectors unsupervised.


 Inheritance diagram for OpenANN::SparseAutoEncoder:
Inheritance diagram for OpenANN::SparseAutoEncoder: 1.8.4
1.8.4