|
OpenANN
1.1.0
An open source library for artificial neural networks.
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
OpenANN
1.1.0
An open source library for artificial neural networks.
|
In this environment the agent has to control a cart such that the pole mounted at the top of the cart does not pass a defined angle threshold. More...
#include <SinglePoleBalancing.h>
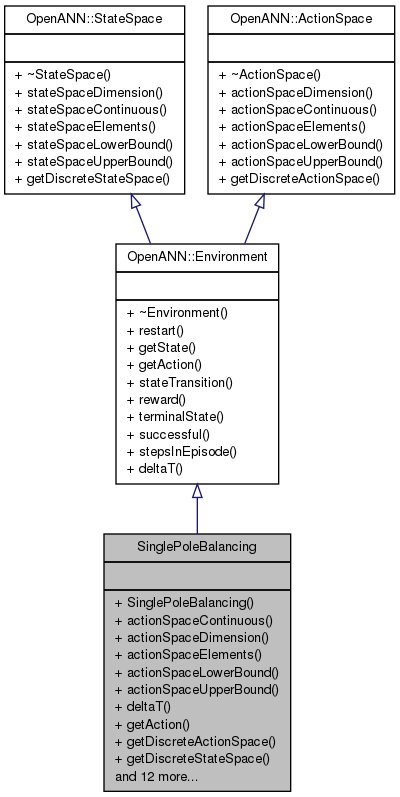
 Inheritance diagram for SinglePoleBalancing:
Inheritance diagram for SinglePoleBalancing:Public Member Functions | |
| SinglePoleBalancing (bool fullyObservable=true) | |
| virtual bool | actionSpaceContinuous () const |
| virtual int | actionSpaceDimension () const |
| virtual int | actionSpaceElements () const |
| virtual const Action & | actionSpaceLowerBound () const |
| virtual const Action & | actionSpaceUpperBound () const |
| virtual double | deltaT () const |
| Time between two simulation steps. More... | |
| virtual const Action & | getAction () const |
| Get current action. More... | |
| virtual const ActionSpace::A & | getDiscreteActionSpace () const |
| virtual const StateSpace::S & | getDiscreteStateSpace () const |
| virtual const State & | getState () const |
| Get current state. More... | |
| virtual void | restart () |
| Restart environment. More... | |
| virtual double | reward () const |
| Get reward. More... | |
| virtual bool | stateSpaceContinuous () const |
| virtual int | stateSpaceDimension () const |
| virtual int | stateSpaceElements () const |
| virtual const State & | stateSpaceLowerBound () const |
| virtual const State & | stateSpaceUpperBound () const |
| virtual void | stateTransition (const Action &action) |
| Perform an action. More... | |
| virtual int | stepsInEpisode () const |
| Number of steps during the episode. More... | |
| virtual bool | successful () const |
| Check if the agent was successful. More... | |
| virtual bool | terminalState () const |
| Check for terminal state. More... | |
| Public Member Functions inherited from OpenANN::Environment | |
| virtual | ~Environment () |
| Public Member Functions inherited from OpenANN::StateSpace | |
| virtual | ~StateSpace () |
| Public Member Functions inherited from OpenANN::ActionSpace | |
| virtual | ~ActionSpace () |
Additional Inherited Members | |
| Public Types inherited from OpenANN::StateSpace | |
| typedef Eigen::VectorXd | State |
| typedef std::vector< State > | S |
| Public Types inherited from OpenANN::ActionSpace | |
| typedef Eigen::VectorXd | Action |
| typedef std::vector< Action > | A |
In this environment the agent has to control a cart such that the pole mounted at the top of the cart does not pass a defined angle threshold.
A more difficult version of this benchmark is DoublePoleBalancing.
| SinglePoleBalancing::SinglePoleBalancing | ( | bool | fullyObservable = true) |
|
virtual |
Implements OpenANN::ActionSpace.
|
virtual |
Implements OpenANN::ActionSpace.
|
virtual |
Implements OpenANN::ActionSpace.
|
virtual |
Implements OpenANN::ActionSpace.
|
virtual |
Implements OpenANN::ActionSpace.
|
virtual |
Time between two simulation steps.
Reimplemented from OpenANN::Environment.
|
virtual |
|
virtual |
Implements OpenANN::ActionSpace.
|
virtual |
Implements OpenANN::StateSpace.
|
virtual |
|
virtual |
Restart environment.
Implements OpenANN::Environment.
|
virtual |
|
virtual |
Implements OpenANN::StateSpace.
|
virtual |
Implements OpenANN::StateSpace.
|
virtual |
Implements OpenANN::StateSpace.
|
virtual |
Implements OpenANN::StateSpace.
|
virtual |
Implements OpenANN::StateSpace.
|
virtual |
|
virtual |
Number of steps during the episode.
Implements OpenANN::Environment.
|
virtual |
Check if the agent was successful.
Implements OpenANN::Environment.
|
virtual |
Check for terminal state.
Implements OpenANN::Environment.
 1.8.4
1.8.4